|
|
News
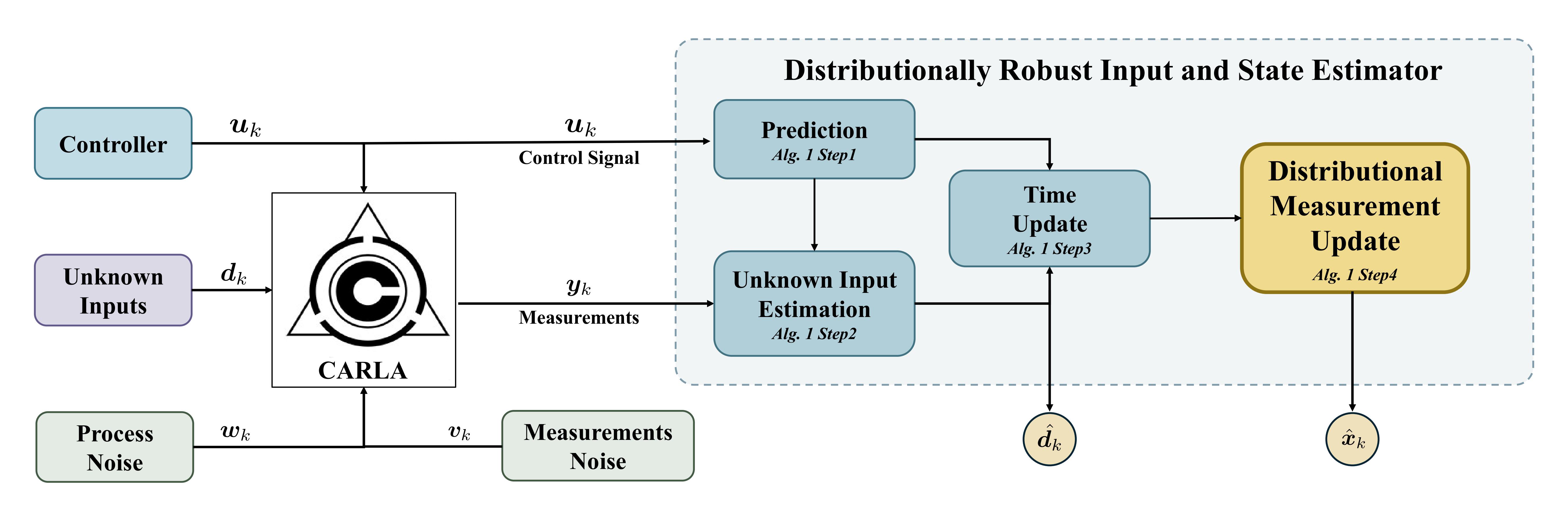
This paper proposes a novel framework for the distributionally robust input and state estimation (DRISE) for autonomous vehicles operating under model uncertainties and measurement outliers. The proposed framework improves the input and state estimation (ISE) approach by integrating distributional robustness, enhancing the estimator's resilience and robustness to adversarial inputs and unmodeled dynamics. Moment-based ambiguity sets capture probabilistic uncertainties in both system dynamics and measurement noise, offering analytical tractability and efficiently handling uncertainties in mean and covariance. In particular, the proposed framework minimizes the worst-case estimation error, ensuring robustness against deviations from nominal distributions. The effectiveness of the proposed approach is validated through simulations conducted in the CARLA autonomous driving simulator, demonstrating improved performance in state estimation accuracy and robustness in dynamic and uncertain environments.
References:
|
Towards Resilient Tracking in Autonomous Vehicles: A Distributionally Robust Input and State Estimation Approach
Kasra Azizi, Kumar Anurag, and Wenbin Wan IFAC Intelligent Autonomous Vehicles (IAV), 2025 |
